



















Instruction Manual
748467-A
January 2002
3-16 Operation Rosemount Analytical Inc. A Division of Emerson Process Management
Model MicroCEM
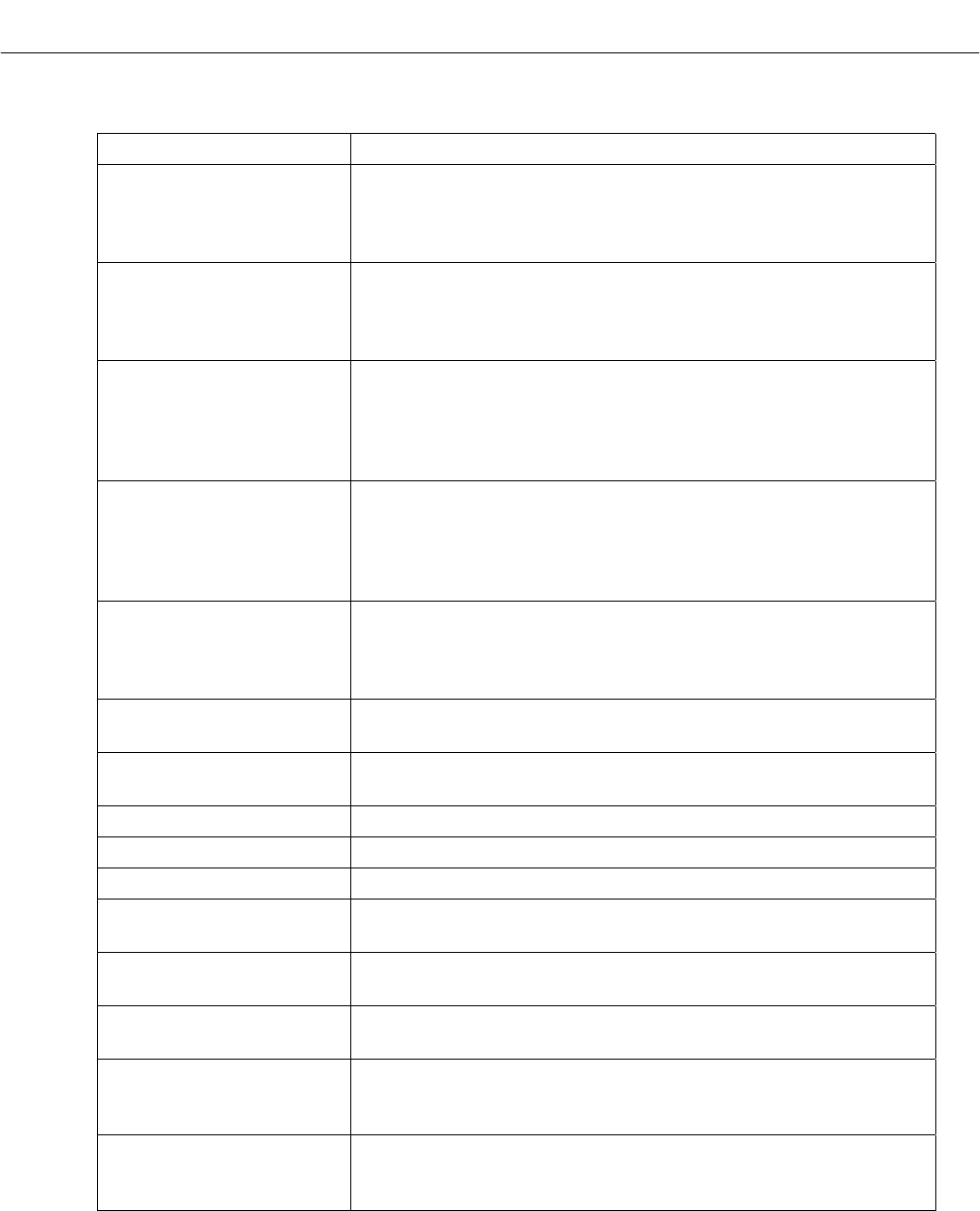
PID Setting Description
PSetting
Proportional Gain. This parameter is set by using typical PID
tuning methods. The P setting is mandatory and is the first pa-
rameter to adjust. It provides a command directly proportional to
the error.
ISetting
Integral Gain. This parameter is set by using typical PID tuning
methods. The I setting is optional and is used to make small ad-
justments to correct a small error which persists for a period of
time.
DSetting
Derivative Gain. This parameter is set by using typical PID tuning
methods. The D setting is optional. It is used to adjust the com-
mand based on change in error. It can be used to reduce over-
shoot, which typically occurs when the P settings is used by itself.
This parameter tends to amplify any noise present in the input.
MaxSpeedSetting
Should be set to the typical warm-up/cool-down speed in
°C/second when the heater/cooler is operated at 100% power.
Increasing this value effectively decreases the Proportional, Inte-
gral and Derivative gain. Decreasing this value effectively in-
creases the Proportional, Integral and Derivative gain.
ResetIntegralError
Integral Reset Error. Setting used to reset Integral value when
error is larger than this value. This parameter is used to prevent
the integral value from building up while the error is large and
then causing overshoot when the setpoint is reached.
IntegralMaxPercent
Maximum percent output power that can be accumulated by the
Integral component. (0-100) The default is 10 percent.
IntegralMinPercent
Minimum percent output power that can be accumulated by the
Integral component. (0-100) The default is 10 percent.
MaxPercent Maximum zone output power in percent (0-100).
MinPercent Minimum zone output power in percent (0-100).
MinAlternationPercent Minimum
SetPoint
This is the temperature setpoint, in degrees Celsius, for this tem-
perature control loop.
LowTempLimit
If the temperature (°C) is below this value during the MicroCEM
process (not including the warm-up phase) an alarm will occur.
HighTempLimit
If the temperature (°C) is above this value during the MicroCEM
process (not including the warm-up phase) an alarm will occur.
MaxOffCurrent
If the current reading is below the maximum-off current while the
heater is turned off, the heater has failed with a Heater Control
failure.
MinOnCurrent
If the current reading is below the minimum-on current while the
heater is turned on, the heater has failed with a Heater Burnout
status.
Table 3-6. PID Settings – Sections Descriptions